La unidad de medida de la fuerza es el newton y se representacon una "N" (mayúscula); ¿Cuál es
su expresión matemática?
Kg
N
(Kg)(m/s2)
m/s2
SON CANTIDADES
VECTORIALES QUE SE DEFINEN MEDIANTE UN PUNTO DE APLICACIÓN, UNA MAGNITUD, UNA
DIRECCIÓN Y UN SENTIDO.
LA MASA
LA
FUERZA
EL
PESO
Encuentra la resultante de los siguientes vectores. Indica su magnitud, dirección y sentido.
3. A(-3, -2) y B(2,4).
4. A(-3,-2) y B(3,2).
5. u(5,4) y v(-1, 2)
6. Una excursionista comienza un viaje al caminar
primero 25.0 km hacia el sureste desde su
vehículo. Se detiene y levanta su tienda para pasar
la noche. En el segundo día, camina 40.0 km en
una dirección 60.0º al noreste, punto en el cual
descubre una torre de guardabosque. Encuentra el desplazamiento de la excursionista.
La suma gráfica de vectores puede realizarse de dos maneras:
Vamos con la primera forma:
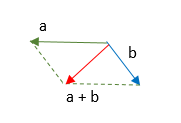
1 – Tenemos los vectores u y v:
Queremos sumar gráficamente v+u. Por tanto, colocamos el origen de u en el extremo de v:
Unimos el origen de v con el extremo de u y obtenemos el vector resultante v+u:
Intenta tú mismo realizar la suma gráfica de u+v y verás que el resultado es el mismo ;).
Vamos con la segunda forma de sumar vectores gráficamente:
2 –
Operaciones con Vectores por el Método del Paralelogramo
Para utilizar métodos gráficos en la suma o resta de vectores, es necesario representar las cantidades en una escala de medición manipulable. Es decir, podemos representar un vector velocidad de 10 m/s hacia el norte con una flecha indicando hacia el eje y positivo que mida 10 cm, en la cual, cada cm representa una unidad de magnitud real para la cantidad (1 m/s).
El vector que resulta de operar dos o más vectores, es conocido como el vector resultante, o simplemente la resultante .
El método del paralelogramo permite sumar dos vectores de manera sencilla. Consiste en colocar los dos vectores, con su magnitud a escala, dirección y sentido originales, en el origen, de manera que los dos vectores inicien en el mismo punto.
Los dos vectores forman dos lados adyacentes del paralelogramo. Los otros lados se construyen trazando líneas paralelas a los vectores opuestos de igual longitud.
El vector suma resultante se representa a escala mediante un segmento de recta dado por la diagonal del paralelogramo, partiendo del origen en el que se unen los vectores hasta la intersección de las paralelas trazadas.
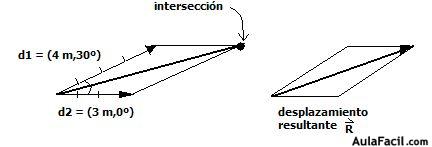
Ejemplo. Una bicicleta parte desde un taller de reparación y se desplaza (4 m,30º) y luego (3 m, 0º). Encuentre el desplazamiento total de la bicicleta, indicando la dirección tomada desde el taller.
El desplazamiento total se da en dos tramos. Cada tramo desplazado se representa por los vectores d1 y d2. El desplazamiento total es D = d1 y d2.
Los dos vectores son dibujados a la misma escala, y se colocan en el mismo origen. Luego se trazan las líneas paralelas.
Si medimos con una regla, a la escala dada, el tamaño del vector resultante debe dar aproximadamente 6.75 unidades de la escala; es decir, la magnitud del vector desplazamiento total es de 6.75 m.
La medida de la dirección se toma con la ayuda de un transportador, y debe dar aproximadamente 17º desde el origen propuesto.
El sentido del vector resultante es positivo, según el marco de referencia común (plano cartesiano, hacia x positivo y hacia y positivo). Entonces como resultado, la bicicleta se desplaza (6.75 m,17º).
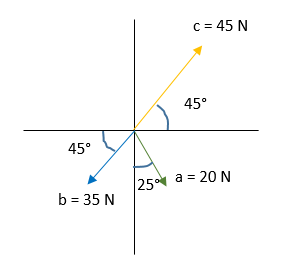
Tenemos los siguientes vectores:
Este ejercicio lo resolveré por el método del paralelogramo;
Ahora trazamos los dos vectores desde el mismo origen y formamos un paralelogramo trazando líneas paralelas a los vectores, la resultante es la diagonal que se traza desde el origen.
Tenemos los siguientes vectores:
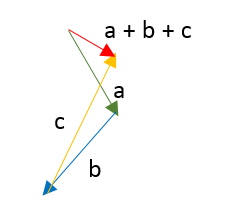
Este ejercicio lo resolveré por el método cola a punta;
Seguimos las reglas generales de este método:
Usar la misma escala para todos los vectores
Trazar un vector (el orden no es importante)
Trazar el segundo vector, empezando desde el final del primer vector (la punta de la flecha), hay que dibujar correctamente el vector cuidando el ángulo, longitud y sentido.
La suma de los dos vectores es la flecha que se traza desde el principio del primer vector hasta la punta del segundo.
Bloque I. La descripción del movimiento y la fuerza
TEMA:
La descripción de las fuerzas en el entorno
SUBTEMAS:
• La fuerza; resultado de las interacciones por contacto (mecánicas)
y a distancia (magnéticas y electrostáticas), y representación con
vectores.
APRENDIZAJES ESPERADOS
• Describe la fuerza como efecto de la interacción entre los objetos
y la representa con vectores.
COMENTA ESTE VIDEO
Si quieres exentar el examen correspondiente a diciembre construye esta máquina de fuerzas. Preséntala el día 12 diciembre
La fuerza es
un concepto difícil de definir, pero muy conocido. Sin que nos digan lo que es la fuerza podemos intuir su significado a través de la experiencia diaria.
Una fuerza es algo que cuando actúa sobre un cuerpo, de cierta masa, le provoca un efecto.
Por ejemplo, al levantar pesas, al golpear una pelota con la cabeza o con el pie, al empujar algún cuerpo sólido, al tirar una locomotora de los vagones, al realizar un esfuerzo muscular al empujar algo, etcétera siempre hay un efecto.
El efecto de la aplicación de una fuerza sobre un objeto puede ser:
Modificación del estado de movimiento en que se encuentra el objeto que la recibe Modificación de su aspecto físico.ón del estado de movimiento en que se encuentra el objeto que la recibe Modificación de su aspecto físico
Fuerza de interacción por contacto: Los cuerpos deben estar en contacto (tocándose) para ejercerlas y para recibir su efecto. Por ejemplo: cuando nos apoyamos en una pared, empujamos un banco, escribimos, pateamos una pelota, nos colgamos de una soga, etc.
Son fuerzas de interacción por contacto: La fuerza normal, empuje, tensión, rozamiento, elástica, etc.
Fuerza de interacción a distancia: Los cuerpos no necesariamente deben estar tocándose para ejercer y recibir su efecto. Por ejemplo: cuando cae un cuerpo, un imán atrae a un alfiler, etc.
Son fuerzas de interacción a distancia: la fuerza gravitatoria, eléctrica, magnética.
Representación de la Fuerza con vectores.
La fuerza es una cantidad vectorial; es decir tiene magnitud, dirección y sentido. Por ser un vector Gráficamente, se representa por un segmento de recta con una punta de flecha en uno de sus extremos, donde el tamaño de esta es la magnitud, la punta de la flecha indica el sentido y el ángulo la dirección.
Vectorialmente se denota con la letra (F) con una flecha sobre la misma o con la letra sola en negrita. Su magnitud letra sola o el vector entre barras verticales.
Fuerza resultante
Si sobre un cuerpo actúan varias fuerzas se pueden sumar las mismas de forma vectorial (como suma de vectores) obteniendo una fuerza resultante, es decir equivalente a todas las demás. Si la resultante de fuerzas es igual a cero, el efecto es el mismo que si no hubiera fuerzas aplicadas: el cuerpo se mantiene en reposo o con movimiento rectilíneo uniforme, es decir que no modifica su velocidad.
En la mayoría de los casos no tenemos las coordenadas de los vectores sino que tenemos su módulo y el ángulo con el que la fuerza está aplicada. Para sumar las fuerzas en este caso es necesario descomponerlas proyectándolas sobre los ejes y luego volver a componerlas en una resultante (composición y descomposición de fuerzas).
Métodos gráficos de suma vectorial.
Para utilizar métodos gráficos en la suma o resta de vectores, es necesario representar las cantidades en una escala de medición manipulable. Es decir, podemos representar un vector velocidad de 10 m/s hacia el norte con una flecha indicando hacia el eje y positivo que mida 10 cm, en la cual, cada cm representa una unidad de magnitud real para la cantidad (1 m/s).
El vector que resulta de operar dos o más vectores, es conocido como el vector resultante, o simplemente la resultante .
Fuerza
Una fuerza es la acción que modifica el estado de reposos o movimiento de los cuerpos.
Una fuerza es una acción tal que aplicada sobre un cuerpo modifica su velocidad (mediante una aceleración). La fuerza es una magnitud vectorial. En el sistema internacional se mide en Newton.
Representación con vectores
Una fuerza puede representarse mediante un vector. Algunas veces un cuerpo mes sometido a más de una fuerza. En éste caso, cada una de las fuerzas debe estar representada por un vector.
Vector
Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son:
Origen
O también denominado Punto de aplicación. Es el punto exacto sobre el que actúa el vector.
Módulo
Es la longitud o tamaño del vector. Para hallarla es preciso conocer el origen y el extremo del vector, pues para saber cuál es el módulo del vector, debemos medir desde su origen hasta su extremo.
Dirección
Viene dada por la orientación en el espacio de la recta que lo contiene.
Sentido
Se indica mediante una punta de flecha situada en el extremo del vector, indicando hacia qué lado de la línea de acción se dirige el vector.
Hay que tener muy en cuenta el sistema de referencia de los vectores, que estará formado por un origen y tres ejes perpendiculares. Este sistema de referencia permite fijar la posición de un punto cualquiera con exactitud.
Fuerza: Resultado de las interacciones por contacto
Interacciones:
De contacto
Son aquellas en que el cuerpo que ejerce la fuerza está en contacto directo con el cuerpo que la recibe.
-Mecánica: Producida mediante un objeto mecánico con una determinada intensidad y que provoca cambios en el receptor.
A distancia: Son aquellos que presentan cuando entre los cuerpos existe una atracción sin que entren en contacto directo.
-Magnética: Ejercida de un polo a otro y como consecuencia del movimiento de partículas se cargan los cuerpos.
-Electrostática: Es aquella que se presenta entre cargas en reposo. Atractiva si las cargas son opuestas y repulsivas si son del mismo signo.
Representación con vectores
Una fuerza puede representarse mediante un vector. Algunas veces un cuerpo es sometido a más de una fuerza. En este caso, cada una de las fuerzas debe estar representada por un vector.
Vector Resultante. (VR) El vector resultante en un sistema de vectores, es un vector que produce el mismo efecto en el sistema que los vectores componentes.
Vector Equilibrante. (VE) Es un vector igual en magnitud y dirección al vector resultante pero en sentido contrario es decir a 180°.
Fuerza Resultante
Si sobre un cuerpo actúan varias fuerzas se pueden sumar las mismas de forma vectorial (como suma de vectores) obteniendo una fuerza resultante, es decir equivalente a todas las demás. Si la resultante de fuerzas es igual a cero, el efecto es el mismo que si no hubiera fuerzas aplicadas: el cuerpo se mantiene en reposo o con movimiento rectilíneo uniforme, es decir que no modifica su velocidad.
En la mayoría de los casos no tenemos las coordenadas de los vectores sino que tenemos su módulo y el ángulo con el que la fuerza está aplicada. Para sumar las fuerzas en este caso es necesario descomponerlas proyectándolas sobre los ejes y luego volver a componerlas en una resultante (composición y descomposición de fuerzas).
Fuerza Equilibrante
Se llama fuerza equilibrante a una fuerza con mismo módulo y dirección que la resultante (en caso de que sea distinta de cero) pero de sentido contrario. Es la fuerza que equilibra el sistema. Sumando vectorialmente a todas las fuerzas (es decir a la resultante) con la equilibrante se obtiene cero, lo que significa que no hay fuerza neta aplicada.
Interacciones; por contacto y a distancia
Contacto:
-mecánicas
-patear un balón
-amasar plastilina
-golpear a alguien
A distancia:
-Eléctrica: Cuando frotamos una regla de plástico y lo acercamos a pequeños pedazos de papel para moverlos
-Magnética: La orientación de una brújula con el campo magnético de la tierra
-Gravitacional: Movimientos de los planetas que giran alrededor del sol
-------------------
Cinemática: Rama de la física que estudia el movimiento de los cuerpos sin importar las causas que los producen.
Dinámica: Se enfoca en conocer y analizar dichas causas.
Existen dos tipos de interacciones: por contacto y a distancia.
Dentro de las interacciones por contacto están todas aquellas que involucren el roce o toque entre dos objetos. A este tipo de interacciones también se les conoce como interacciones mecánicas.
Fricción o rozamiento: Interacción que actúa en sentido opuesto al del movimiento.
Dentro de las interacciones a distancia tenemos la eléctrica, la magnética y la gravitacional. Interacción eléctrica, Interacción magnética e Interacción gravitacional.
En física, la fuerza se define como la magnitud de la interacción entre los objetos y tiene asociada una dirección de acción.
De acuerdo con lo anterior, la fuerza es considerada un vector o una cantidad vectorial. De igual forma que el desplazamiento, la velocidad y la aceleración.
TAREA PARA ENTREGAR EL VIERNES 7
SON CANTIDADES VECTORIALES QUE SE DEFINEN MEDIANTE UN
PUNTO DE APLICACIÓN, UNA MAGNITUD, UNA DIRECCIÓN Y UN
SENTIDO.
LA MASA
LA FUERZA
EL PESO
A LA FUERZA QUE REPRESENTA EL EFECTO DE LA ACCION DE UNSISTEMA DE FUERZAS SE LE LLAMA Y SE LE SIMBOLIZA COMO?
FR FUERZA RESULTANTE
F1 FUERZA RESULTANTE
F2 FUERZA RESULTANTE
SE LE LLAMA A LAS FUERZAS QUE ACTUAN EN LA MISMA DIRECCION Y QUE PUEDEN TENER DIFERENTE SENTIDO.
FUERZAS RECURRENTES
FUERZAS CONCURRENTES
FUERZAS COLINEALES
SOBRE UN CUERPO SIEMPRE ACTUAN 2 O MAS FUERZAS; CADA UNA DE ELLAS TIENE SU PROPIO PUNTO DE APLICACION, SU MAGNITUD,DIRECCION Y SENTIDO; ¿A ESTE CONJUNTO DE FUERZAS SE LE LLAMA?
SISTEMA INTERNACIONAL
SISTEMA DE UNIDADES
SISTEMA DE FUERZAS
La unidad de medida de la fuerza es el newton y se representa
con una "N" (mayuscula); cual es su expresión matematica?
Kg
N
(Kg)(m/s2
m/s2
CON LOS VECTORES SIGUIENTES, REALIZA LO QUE SE PIDE